
Observations of oceanic and atmospheric turbulence, background ocean currents, and surface gravity waves from fixed and moving platforms were conducted during a field cruise with the Research Vessl Håkon Mosby between 13 – 16 November 2014. The main objective of the campaign was to check the performance of different new oceanographic instruments available for the Offshore Boundary Layer Observatory (OBLO) project.
To have as much as possible control on the test deployment of the new instrumentation under real offshore conditions and to efficiently keep track of all physical processes, the test site was cjosen to be a shallow water area (<30 m water depth)) with nearly smooth topographical variations. This also assured a successful recovery of all instruments even in harsh weather conditions, and the potential use of an ROV in case of a recovery failure. After investigating wind and wave climatologies for different coastal spots in Norway, a deployment site approximately 1 km off the coast off Karmøy was chosen. The water depth at the mooring site was about 28 m, exposed permanently with (southeastward) wind together with a mixed sea state. These conditions are similar to those the deployments would encouter in the following OBLEX-F1 campaign at the German research station FINO1.
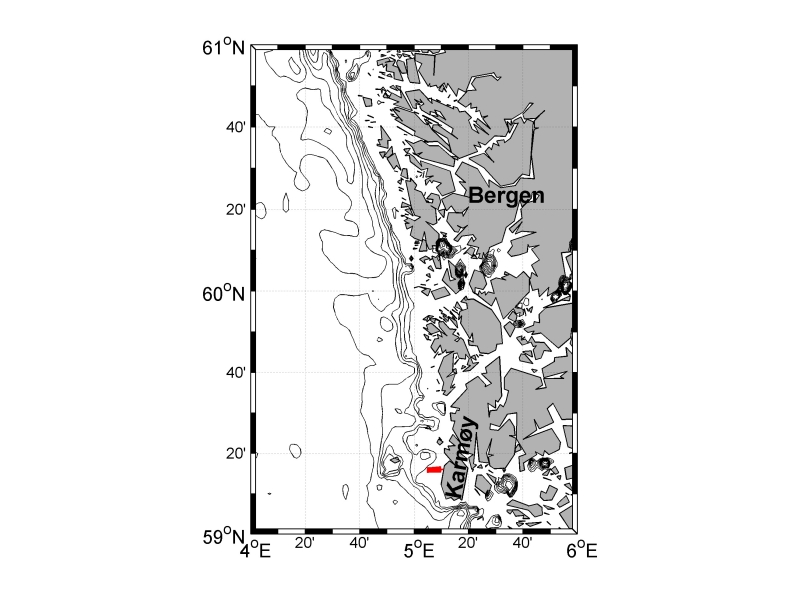
Map of western Norway. The deployment site off the coast of Karmøy is shown by the red rectangle.
The following instruments were deployed at a depth of approximately 28 m with a separation of a few 100 meters between each other:
- A bottom frame (at 26 m below sea surface) equipped with oceanographic sensors: 1 upward looking S1000 (Signature 1000 kHz Doppler current profiler, 5 beams with AD2CP technology, Nortek AS) and 1 Nortek vector ADV. The sampling frequency of the AD2CP was 4 Hz and the sampling frequency of the ADV was 8 Hz at a duty cycle of 15 min on, 1 min off.
- A bottom-anchored flotation element, MATS (Moored Autonomous Turbulence System), 6 m below the sea surface (at water depth of 24 m), for near-surface turbulence measurements. The platform was equipped with two shear-probes, acceleration sensors, 2 fast-response thermistors, one pressure sensor as well as an upward looking Nortek vector ADV, all sampling at burst mode with frequency between 64 and 512 Hz at a duty cycle of 15 min on, 1 min off, (ADV with sampling frequency of 8 Hz with the same duty cycle).
- A bottom-anchored submerged elliptic buoy, intended for use in the OBLO project. The buoy was anchored 8 m below the surface (at water depth of 26 m), and equipped with an upward looking S1000. The sampling frequency was 4 Hz at a duty cycle of 15 min on, 1 min off.
- A free-floating (Lagrangian) buoy, intended for use in the OBLO project. The buoy was deployed during the last day and drifted freely with the upper ocean current for approximately 2 hours. An S1000 and a GoPro camera was mounted on the lower buoy construction below the sea surface. A second GoPro camera was mounted to the upper air-side buoy construction. The goal with this deployment was testing a new designed wave-following measuring system suitable for near-surface turbulence, current, and surface wave measurements across the air-sea wavy interface.
- A new way to sample turbulence data in the surface wave-layer using a MSS90L tethered microstructure profiler in the vicinity of mooring site was tested too.
- In addition to the oceanographic deployments, the NORCOWE DCF-system was mounted on a mobile mast at the front bow of the RV Håkon Mosby. The sensor height was approximately 2 m above the deck and 10 m above the sea surface. A GoPro camera was added to the DCF system to monitor the sea state during daytime. The sampling rate of the DCF system and the Camera was 25 Hz/ 25 fpm.
- Video-based measurements with a GoPro camera were performed during the cruise in the vicinity of DCF-system at front bow of the RV Håkon Mosby. This measurement technique gives the chance to study air-sea interaction exchange processes such as gas and spray exchanges, and white capping/ breaking events. The sampling frequency of the camera was set to match the one of the DCF system, i.e. 25 Hz/ 25 fps.
In addition, atmospheric DCF measurements were performed during the entire cruise at the front bow of the RV Håkon Mosby. On several occasions, a GoPro camera to observe white capping and wave breaking complimented the DCF system.
[slideshow_deploy id=’458′]